A aplicação de drones à engenharia civil, assim como em muitas outras áreas, já é uma realidade bem estabelecida há pelo menos uns 10 anos. Na verdade, se traçarmos o uso de aeronaves não tripuladas, isso vai até uns 50 ou 60 anos atrás. Porém, aqui estou focando nos quadri-rotores, que são o tipo mais comum e que muita gente tem.
Esse tipo de aeronave ganhou popularidade por causa do seu preço e da facilidade de uso, já que se baseia em um sistema fly-by-wire no qual os comandos do piloto são interpreatados e implementados pelo computador da aeronave. Por isso, um drone de nível básico, como um DJI Mini, é capaz de pairar dentro de um cubo de menos de um metro cúbico de volume sem nenhuma assistência do piloto.
Além da automação de vôo em si, o desenvolvimento de gimbals, que são estabilizadores de imagem, permitiram a incoporação de câmeras nas aeronave, já que a imagem pode ser estabilizada mecanicamente, eliminando a influência dos movimentos do drone na imagem. Em outras palavras, o gimbal compensa a posição da câmera quando o drone se inclina em qualquer direção, além de contar com mecanismos de absorção de vibração.
Mesmo um drone mais comum é equipado com câmeras que possuem a mesma qualidade de um celular de nível intermidiário, como é o caso dos principais modelos da DJI, Hubsan ou Parrot. Deste modo, essas câmeras já possuem qualidade suficiente para serem empregadas até mesmo em videografia. Além dos mais populares, existem modelos mais avançados nos quaise se pode usar uma câmera profissional, como é o caso do Iflight Taurus, que pode levar uma DSLR sem problemas.
Por causa desses fatores, os drones tornaram-se ferramentas acessíveis e permitiram a popularização de técnicas de filmagem e fotografia aéreas, já que não é mais preciso ser um piloto profissional para operá-los. Isso, evidentemente, abriu uma ampla gama de novas aplicações e afetou de maneira muito significativa a engenharia civil.
Drones na engenharia civil
Do ponto de vista de engenharia, as câmeras dos modelos mais básicos já permitem muitas aplicações diferentes. Dentre as mais comuns estão a inspeção de locais de difícil acesso e o acompanhamento aereo de obras. No primeiro caso, as inspeções costumam ser feitas através de vídeos e fotos, enquanto no segundo se usa técnicas de mapeamento para a produção de fotos planificadas, ou ortofotos, dos canteiros de obras.
O uso de vídeo para inspeção, no entanto, traz uma série de inconvenientes. Em primeiro lugar, é preciso assistir a todo o vídeo, que pode ser longo, procurando por defeitos. Em seguida, é preciso ampliar a imagem, e a resolução, mesmo em 4K, equivale somente a uma imagem de menos de 8 megapixels. Para piorar ainda mais a situação, o vídeo fica preso à perspectiva da câmera, além de não permitir que as falhas possam ser identificadas por coordenadas, ou mesmo extrair medidas minimamente precisas.
Portanto, apesar de abrir novas possibilidades, os métodos convencionais de inspeção por drones possuem inconvenientes que tornam o trabalho todo ou de pouco valor, ou pouco produtivo. No entanto, como veremos, a pesquisa na área já demonstra que existem novas aplicações possíveis que abrem todo um leque poderoso de aplicações quando os drones são somados a técnicas de fotogrametria. Além disso, aplicações de inspeção convencionais não são quantitativas.
A seguir, mostrarei alguns trabalhos desenvolvidos no mundo todo e que envolvem a aplicação de drones para a obtenção de modelos 3D de estruturas, ou que geram imagens para análise por inteligência artificial e modelos quantitativos. A Itália, por ter um patrimonies arquitetônico muito rico e, ao mesmo tempo, estar sempre ameaçada por terremotos, acabou se tornando a líder em pesquisas no segmento. No Brasil, entretanto, tudo indica que ainda estamos na época do vídeo, exceto por alguns casos que relatarei brevemente no final.
Por fim, mostrarei os meus próprios resultados aplicando as técnicas detalhadas nos artigos.
Como funciona a fotogrametria
A fotografia é a técnica de registrar, em 2D, uma cena bem determinada no espaço e no tempo da realidade – que é 3D, através da interação entre a luz e um sensor foto-sensível, que pode ser analógico ou digital. Trocando em miúdos, é um registro em que uma das dimensões do espaço não é registrada, especificamente a que fica na direção do eixo óptico da câmera. Por isso, o registro fotográfico sempre é incompleto.
No entanto, se mais de uma foto da cena é tirada com a câmera em posições e orientações suficientemente diferentes (que chamamos de poses), então é possível identificar pontos comuns entre as fotos, o que permite calcular quais eram as posições de cada câmera. Com essa informação, pode-se reconstruir as posições de cada um desses pontos no espaço 3D, recuperando boa parte da informação perdida na fotografia. A fotogrametria, então, é um método que permite a extração de informação tridimensional a partir de múltiplos registros bidimensionais. Ou, ainda, a fotogrametria é uma espécie de meta-fotografia.
Assim, o modelo fotogramétrico sempre é mais rico de informação do que o conjunto de fotos que o formou, por maior que seja esse conjunto. Por exemplo, ele abre a possibilidade de enxergar os objetos por ângulos que não estejam presentes em nenhuma fotografia. Além disso, também é possível fazer medidas de profundidade com uma precisão bastante razoável, o que é impossível só com as fotos isoladas. Porém, a fotogrametria é muito diferente de simplesmente se juntar todas as fotos e fazer um mosaico 3D. Como veremos abaixo, os modelos são fieis aos objetos originais do mundo real, e nos permitem manipulações que talvez não teríamos acesso ao vivo.
Fotogrametria com drones
O que tem popularizado a fotogrametria é que nos últimos anos tornou-se possível realizar a técnica com softwares gratuitos, computadores domésticos e câmeras comuns, o que nos leva a estender a técnica a aplicações com drones. Os primeiros artigos acadêmicos sobre essas aplicações começaram a surgir por volta de 2013. Rapidamente, grupos de pesquisa na Europa começaram a identificar o potencial da técnica na avaliação das suas estruturas.
O que surgiu a seguir foi a junção de técnicas de reconstrução 3D (scanner 3D ou Terrain Laser Scanning, que chamarei de TLS daqui por diante), de georrefereciamento com estações totais (ou Total Station, que usarei a abreviatura TS) e de fotogrametria com ou sem drones. A princípio, o uso de TLS e TS serviu como método de validação da precisão (accuracy) da fotogrametria. Além disso, essas técnicas acabaram se mostrando complementares. Enquanto a fotogrametria é excelente para modelos externos e objetos distantes, o TLS é melhor para ambientes internos e objetos próximos, enquanto a TS fornece dados precisos de georreferenciamento e, portanto, de escala, através da implementação de pontos de controle no solo (ou ground control points, que chamarei de GCP daqui por diante).
É crucial notar que os modelos fotogramétricos não são capazes de determinar as escalas dos objetos devido à uma limitação intrínseca dos parâmetros iniciais. Quando o sistema de equações do modelo é resolvido, ele sempre fica determinado a menos de uma constante de escala. Isso acontece porque as posições relativas entre as diferentes fotos não são conhecidas a priori. Por isso, é necessário colocar pontos de controle medidos com outra técnica para que a escala do modelo seja determinada no pós-processamento.
A integração dessas três técnicas, portanto, possibilita a implementação de modelos 3D de alta precisão. Esses modelos, a seguir, podem ter vários destinos. Desde a criação de acervos culturais digitais até a elaboração de plantas de edifícios antigos em CAD, e também cálculos com elementos finitos como veremos a seguir. Para aplicações mais convencionais, as imagens adquiridas a partir da renderização do modelo ortográfico 3D permitem que algoritmos de inteligência artificial processem automaticamente a imagem com a finalidade de detectar falhas em concreto, por exemplo.
Inspeção e avaliação de estruturas
Tendo apresentado a técnica, podemos ver, em alguns exemplos da literatura acadêmica, alguns trabalhos fundadores das técnicas de fotogrametria e modelagem 3D com drones. Alguns desses desenvolvimentos já começaram lá em 2013, enquanto a maioria se encontra entre 2018 e 2021. Esse período coincide justamente com a popularização dos modelos da DJI, que foi a fase de maturação dessa indústria. Abaixo, escolhi alguns artigos que achei mais ilustrativos. Ao todo, a literatura acadêmica deve ter algo em torno de uns 200 artigos sobre o assunto, que não é tão extenso.
Inspeção de pontes e estruturas de concreto armado
O concreto armado é um dos materiais mais utilizados nas construções atuais. Apesar de todas as suas vantagens, especialmente no que diz respeito à flexibilidade de formas e aplicações, seu principal problema é que ele tem uma vida útil curta, da ordem de 70 a 100 anos. A principal patologia a que o material está sujeito é a oxidação da sua estrutura interna de aço.
Quando o ferro oxida, ele tende a se expandir, formando escamas, que são facilmente visíveis em áreas expostas. Contudo, como o aço está dentro do concreto, ele força toda a massa para fora, criando trincas e desplacamentos. Conforme esses desplacamentos vão aumentando, a estrutura interna vai sendo exposta ainda mais, o que cria um círculo vicioso.
A manutenção das estruturas de concreto armado, em si, não é difícil. Basta manter a estrutura impermeabilizada e fazer correções enquanto esses problemas ainda são pequenos. Porém, como de costume, falar é mais fácil do que fazer. Estruturas, como pontes, possuem muitas partes que são praticamente inacessíveis, o que causa sérios transtornos para a manutenção.
Por exemplo, imagine um desses pilares de uma das pontes da Rodovia dos Imigrantes (foto abaixo). Estão posicionados no meio da mata e são centenas por ponte. A inspeção de uma via dessas é um verdadeiro pesadelo por causa da acessibilidade. Em alguns casos, é necessário mandar uma equipe de alpinistas para realizar a vistoria. Também podem ser usados binóculos ou câmeras de super zoom, mas a visão é incompleta e perde o componente tridimensional. Além disso, existem ângulos que nem são visíveis usando esses métodos.

A aplicação de drones, nesses casos, parece óbvia. No entanto, apenas a utilização de vídeos e fotos não melhora muito a situação. As fotos têm o problema de serem difíceis de localizar, isto é, como saber qual foto é de qual parte da ponte? Imagine uma pilha com 3000 fotos. Você seria capaz de identificar problemas, mas encontrar qual problema corresponde a qual coordenada da ponte para enviar a equipe para realizar reparos seria um verdadeiro desafio.
O mesmo acontece com o vídeo. A equipe teria que assistir horas e horas gravações e teria que criar uma linha do tempo para localizar espacialmente as patologias encontradas. Para piorar a situação, a resolução do vídeo sempre é pior que a da foto, o que implica ter que voar mais perto da estrutura para obter o mesmo resultado, o que aumenta os riscos de perda de aeronave.
Dois artigos da literatura mostram uma solução bem interessante para o problema. Um é de uma equipe da Universidade de Nova York em Abu Dhabi (Ko et. al. https://doi.org/10.22260/ISARC2021/0086) e outro é da Universidade de L’Aquila, da Itália (Zollini et. al. https://doi.org/10.3390/rs12193180).
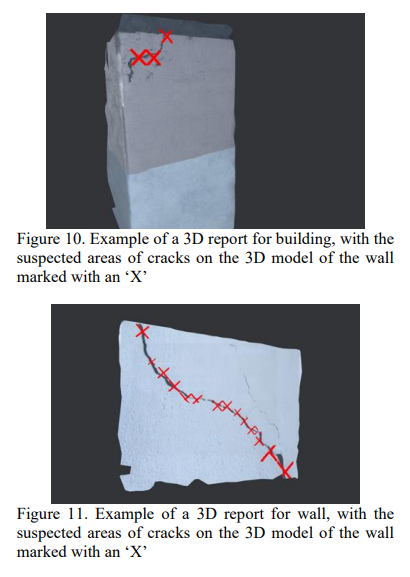
Em ambos os trabalhos, a metodologia consiste em adquirir fotografias aéreas das estruturas, gerar um modelo 3D usando técnicas de fotogrametria e, por fim, utilizar inteligência artificial (IA) para fazer a detecção automatizada de patologias. Os dois artigos seguem as mesmas linhas gerais, e diferem apenas nos detalhes da aplicação.
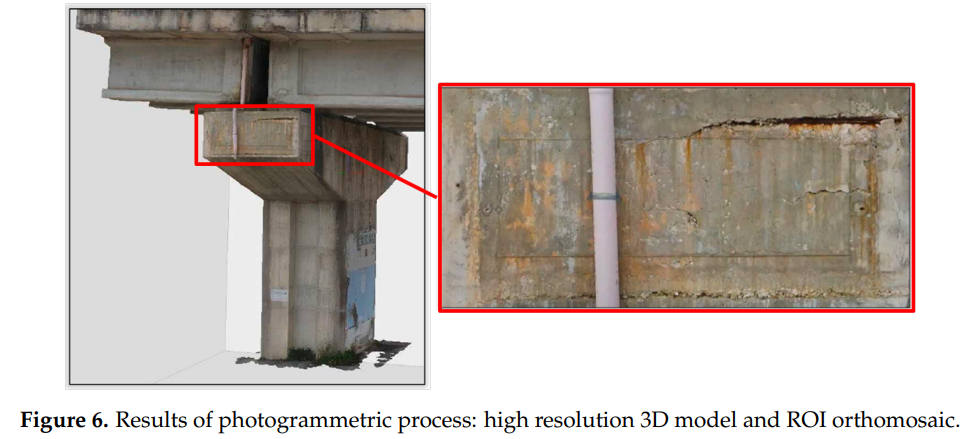
Enquanto a equipe de Abu Dhabi usou um drone comum (o DJI Mavic 2), o time italiano empregou uma aeronave mais especializado que era capaz de carregar uma câmera bem melhor, no caso uma Sony Alpha 6000. Enquanto a equipe dos Emirados Árabes manteve o custo baixo, os italianos partiram para a melhor qualidade.
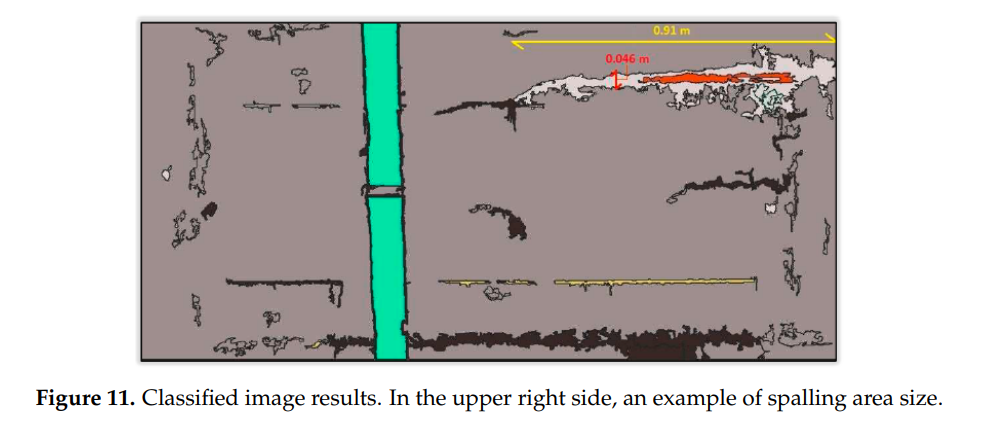
A implementação da fotogrametria seguiu na mesma linha. O pessoal de Abu Dhabi usou o Meshroom, que é um software livre, enquanto os italianos usaram o AgiSoft Photoscan, que é pago. A maior diferença entre os dois trabalhos, no entanto, ocorre no passo final. A equipe italiana partiu para uma técnica que, ao meu ver, é um pouco mais complexa. São gerados ortomosaicos das áreas de interesse a partir do modelo, e eles são analisados utilizando o Orfeo ToolBox, que é, na verdade, uma ferramenta de geociências. Usando essa técnica, não é preciso criar nenhum software específico e as coordenadas podem ser facilmente exportadas e encontradas no objeto real a partir de pontos de referência.
Já o time de Abu Dhabi preferiu processar diretamente as texturas do modelo 3D utilizando a biblioteca opensource Keras. Conforme o Keras encontra e classifica as patologias, ele cria marca nas texturas que, naturalmente, aparecem no modelo 3D.
Este tipo de técnica, como demonstram os dois artigos, já é madura o suficiente para ser aplicada em casos concretos. Tanto que já existe até uma empresa de Singapura que vende um software especializado nisso, chamada H3ZOOM.AI.
Avaliação de danos pós-terremoto
Uma das principais vantagens do drones é justamente o fato de ser remotamente controlado. Alguns drones mais atuais já são capazes de operar a até alguns quilômetros de distância do controle remoto, o que os torna ideais para missões em lugares de alto risco.
Um desses cenários é o que acontece logo após um terremoto. Eles podem ser empregados em muitas frentes diferentes, como a busca por sobreviventes, logística de materiais e avaliação de danos humanos e materiais. Neste artigo, como o assunto é engenharia civil, vou mostrar três exemplos de pesquisas acadêmicas que envolvem a avaliação de danos à construções após terremotos. Um foi realizado por um grupo do Politécnico de Milão e outros dois foram feitos pelo grupo do Departamento de Engenharia Civil da Universidade de L’Aquila.
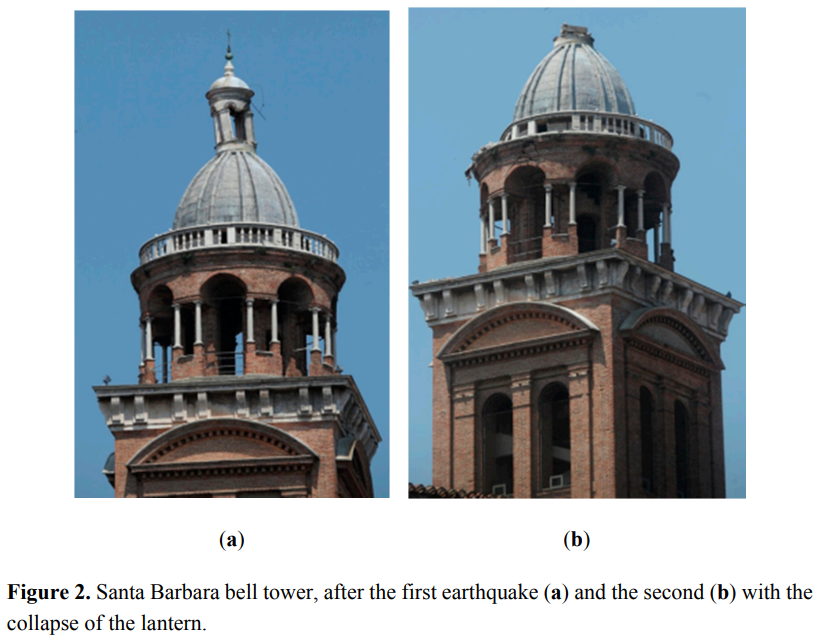
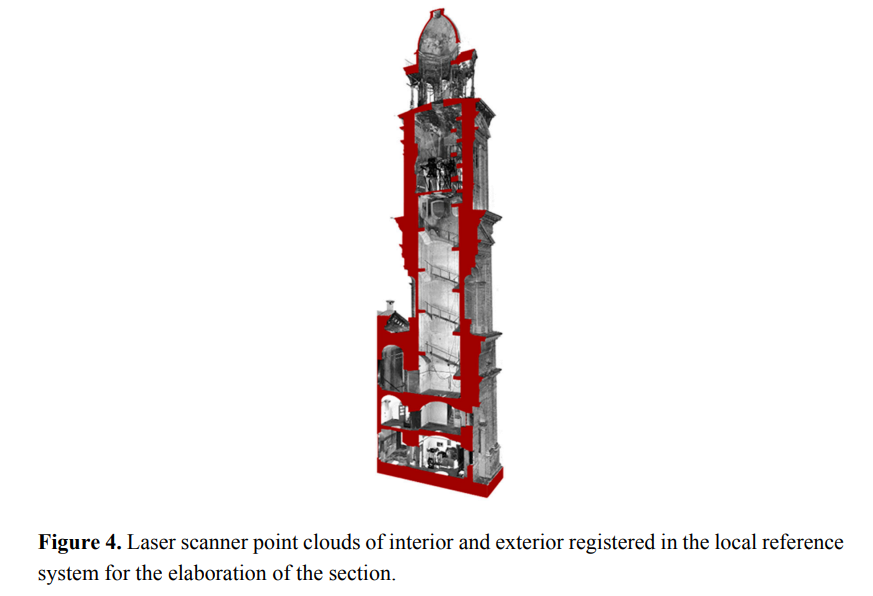
O trabalho do grupo de Milão, assinado por Cristiana Achille et. al., de 2015 (https://doi.org/10.3390/s150715520), foi feito logo após um terremoto que atingiu a cidade de Mântova. Na ocasião, a torre da Igreja de Santa Bárbara sofreu danos estruturais graves, que ocasionaram o colapso da lanterna, que é a parte mais alta da torre (figura abaixo).
Deste modo, o grupo tinha dois objetivos: coletar dados para criar um modelo que serviria tanto para avaliar a situação presente e permitir a elaboração de plantas e desenhos para facilitar o trabalho de restauração. Como, na época, essa metodologia ainda não era consolidada na literatura, o grupo empregou as técnicas de estação total e scanner a laser como complemento e validação da fotogrametria aérea e terrestre para garantir a acurácia dos modelos. Utilizando uma estratégia com GCPs (ground control points ou pontos de controle no chão) e CPs (controls points ou pontos de checagem), o grupo foi capaz de integrar, com precisão, os dados coletados pelos três métodos.
Enquanto o scanner laser é mais preciso que a fotogrametria, ele é limitado à operação no chão e também à distância em relação ao objeto digitalizado. Por isso, ele foi usado, primariamente, para capturar os modelos referentes à estrutura interna da torre. Já a fotogrametria, tanto terrestre (executada com uma câmera Canon 5D) quando a aérea (Octocoptero com Canon EOS 650D), foi responsável pela modelagem da parte externa.
Os modelos obtidos por esses dois métodos diferentes foram unidos utilizando uma metodologia que o grupo já havia testado, antes, em laboratório. Com todos os dados, foi criado um modelo 3D da estrutura toda, tanto interna quanto externa, que pode ser vista na figura abaixo, que é um corte vertical.
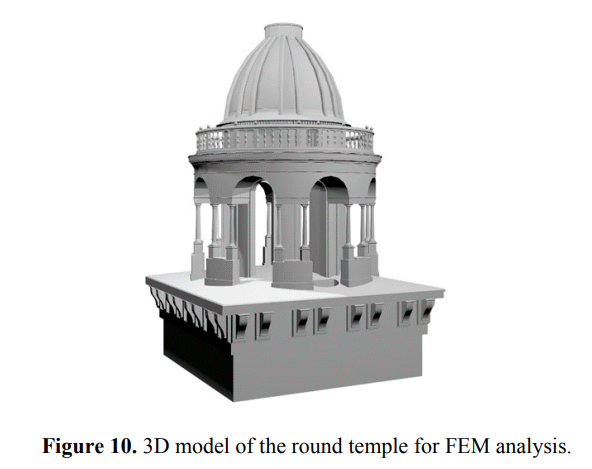
Em seguida, o modelo obtido foi trabalhado usando técnicas de BIM, que veremos mais adiante, para a elaboração de uma maquete utilizável em CAD e simulações de elementos finitos.
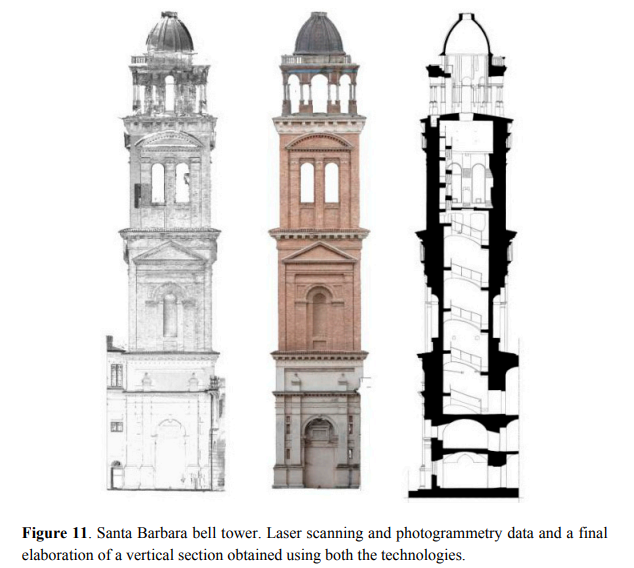
Por fim, a evolução dos modelos elaborados a partir de scanner a laser, fotogrametria e a planta final, gerada a partir desses dados e que foi usada na reconstrução da torre.
Um desenvolvimento muito parecido com o grupo de Milão surgiu na Universidade de L’Aquilla, em 2017, liderado pela Profa. Donatella Dominici (https://doi.org/10.1080/19475705.2016.1176605). Neste primeiro trabalho, são apresentados os fundamentos do método fotogramétrico, e o objetivo era justamente criar uma base para um desenvolvimento posterior.
Neste sentido, esse trabalho focou em aplicar drones de características diferentes com câmeras diferentes e fez a aquisição de dados para validação. Como esse foi um trabalho piloto e que o grupo visa estender a toda a Itália, os alvos de estudo foram escolhidos justamente de modo a representar uma cidade italiana típica. Deste modo, ganha-se uma boa visão de um cenário genérico de aplicações.
A ideia principal era criar modelos 3D com pontos de controle no solo georreferenciados por estações totais. Assim, se pode fazer ortomosaicos com essas referências que servem como base para a análise dimensional das estruturas. Com esta metodologia, é possível exportar nuvens de pontos ou modelos sólidos que servem como base para elaboração de plantas, ortomosaicos ou modelos digitais de superfície. Ele também permitem a inspeção visual, em busca de deformações geométricas que acusem danos a encanamentos, deformações e colapsos. Abaixo estão alguns modelos obtidos nesse estudo.

Já o segundo estudo do grupo de L’Aquila, publicado em 2021 e desta vez liderado pela Dra. Maria Alicandro e em colaboração com o Departamento de Defesa Civil do Ministério do Interior do governo italiano (http://dx.doi.org/10.21014/acta_imeko.v10i4.1141), visou transformar aquele estudo preliminar em uma técnica que possa ser utilizada pelo Corpo de Bombeiros em situações de emergência. Este ainda é considerado preliminar pelo grupo, mas ele é uma amostra de como as coisas caminham para uma consolidação do uso de drones nessas áreas.
Desta vez, o estudo se concentrou principalmente em determinar dimensões em fachadas, comparando os resultados da fotogrametria com drones a estações totais. Com isso, se obteve a margem de precisão das medidas com fotogrametria. O estudo concluiu que é possível determinar a inclinação das fachadas das construções com uma precisão de 5 mm quando comparado às medições com a estação total, e que essa margem é menor do que os deslocamentos de 20 a 25 mm tipicamente observados. Claramente, os resultados são bastante encorajadores, mas é preciso colocar a técnica no seu devido lugar. Ela ainda não é precisa o suficiente para uma análise dimensional a nível de projeto estrutural, mas é suficiente para elaboração de relatórios para tomada de decisão rápida nesse tipo de cenário.
Reconstrução de modelos em 3D para análise
Além do uso para inspeção e avaliação, os drones podem ser usados para fazer o levantamento das estruturas em 3D. Neste caso, os modelos obtidos a partir da fotogrametria não são o produto final, mas o estágio inicial de um processo mais longo. Eles servem como ponto de partida para a elaboração de plantas bi- e tridimensionais utilizando métodos de Modelagem de Informação de Estruturas ou BIM (do inglês Building Information Modelling).
Para um modelo 3D ser utilizável num software de CAD, a rede de pontos do modelo fotogramétrico precisa ser transformado em superfícies parametrizáveis, como planos e curvas suaves. Pense da seguinte maneira. Existem dois de definir um plano. De um lado, posso tentar colocar todos os pontos que o compõe numa lista, que é o que faz a fotogrametria. Por outro, posso pegar apenas três pontos no espaço e escrever as equações com as condições de contorno que geram esse mesmo plano. O segundo método apresenta muitas vantagens em relação ao primeiro, pois ele é computacionalmente muito mais amigável, permite a manipulação muito mais facilmente e, o mais importante, é livre de ruídos. Isso é o que se chama de modelagem paramétrica.
Nenhum modelo fotogramétrico é capaz de gerar superfícies totalmente planas ou curvas perfeitas por dois motivos. O primeiro é que ele é a reprodução de um objeto do mundo real e, como sabemos, no mundo real nenhum objeto é perfeito. Em segundo lugar, a própria técnica tem as suas limitações, especialmente na medida de distâncias sobre o eixo óptico da câmera. Isso cria ruído que, tipicamente, é da ordem de 5 a 20 mm. Ou seja, o modelo fotogramétrico não pode ser operado corretamente por um software de CAD.
Então, é preciso que esse modelo empírico seja transformado num modelo de CAD apropriado, e as técnicas de BIM servem exatamente para isso. De todo modo, é preciso de um ponto de partida, e ele pode ser obtido de algumas formas diferentes. Duas delas são a aquisição de pontos chave usando as estações totais ou os scanners a laser. No entanto, as duas técnicas têm limitações sérias. A primeira captura apenas alguns poucos pontos, com excelente precisão, é verdade, mas poucos. Com isso, os engenheiros precisam preencher o resto do modelo manualmente.
Já o scanner a laser, apesar de poder capturar os detalhes, é uma ferramenta de solo que trabalha a partir de pontos fixos. Assim, a resolução depende da distância entre o scanner e o ponto a ser medido, o que significa que ela não é constante sobre todo o modelo. Além disso, por ser uma ferramenta de solo, ele não pode capturar as partes de cima de um modelo e, muitas vezes, algumas partes não podem ser digitalizadas porque não é possível encontrar uma posição adequada para o scanner. Pense, por exemplo, numa barragem. Onde colocar o scanner para digitalizar a parte frontal da estrutura?
A fotogrametria com drones resolve boa parte desses problemas, apesar de ser menos preciso que ambos. O que muitos times de pesquisa têm proposto é, justamente, a junção das três técnicas para a obtenção de modelos iniciais de alta qualidade para o BIM. A seguir, mostrarei alguns exemplos de trabalhos acadêmicos da área.
Modelo da Ponte de Basento
Em 1975, foi inaugurada a ponte de Basento, em Potenza, Itália. Essa ponte foi um desenvolvimento importante na engenharia do concreto armado, porque foi pioneira no emprego de formas orgânicas na estrutura, como você pode ver na imagem abaixo. Como ela foi projetada no final da década de 60, os métodos computacionais ainda estavam engatinhando e todo o processo de desenvolvimento – liderado pelo engenheiro Sergio Musmeci, foi realizado utilizando maquetes e alguns métodos mais criativos.

Por exemplo, o primeiro modelo da membrana, como foi chamada a parte estrutural da ponte, foi feito com uma armação de arame que serviu de suporte para um filme de sabão com glicerina (a boa e velha bolha de sabão!). Outros modelos foram construídos em isopor e, finalmente, uma miniatura em escala de concreto para teste de carga. Tudo isso foi feito numa época em que não era possível resolver as equações numericamente e, caso elas não tivessem solução analítica, o único método era chutar um resultado e testar na prática. Foi assim que essa ponte foi construída.
Os métodos artesanais, uma tradição italiana, foram utilizados até a construção da ponte, que começou em 1971. Para construir a membrana, foram fabricados moldes em madeira a partir do modelo em escala, tudo feito à mão. Os moldes eram usados para fabricar uma seção e depois reaproveitados nas demais. A ponte foi um sucesso, está lá até hoje e foi tombada como monumento histórico (apesar do mau gosto do design, é preciso admitir que foi uma obra-prima do ponto de vista da engenharia).
Em 2019, o grupo de Francesco Marmo et. al., da Universidade Federico II de Nápolis, (https://doi.org/10.1016/j.engstruct.2019.04.069), fez um estudo que visava comparar a ponte construída com os planos originais de Musmeci, além de permitir um estudo mais detalhado deste tipo de estrutura usando métodos de elementos finitos (ou seja, os métodos computacionais que o Musmeci não tinha na época).
Para isso, o leitor já deve ter adivinhado, usaram um drone. O equipamento foi um DJI Mavic Pro e o vôo foi planejado para obter uma resolução na casa de 1 cm, o que permitiu voar a uma distância de 30 m da ponte. A parte do vôo feita sobre a ponte foi automatizada com o app Pix4D, enquanto as imagens na parte inferior e entre os arcos da membrana foram feitos manualmente. Ao todo, foram coletadas 677 imagens, posteriormente processadas com o AgiSoft Photoscan. O resultado pode ser visto na imagem abaixo, figuras a e b.
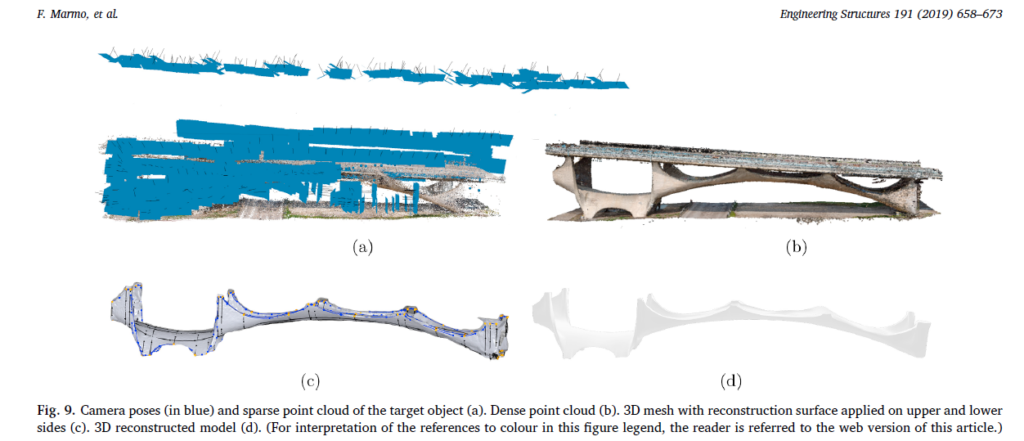
O modelo fotogramétrico foi usado como base para a construção de uma malha 3D com o objetivo de comparar com o modelo 3D gerado a partir dos desenhos originais de Musmeci (lembre-se que na década de 70 ainda não existia o Solid Works. Todo o projeto era feito através de plantas e seções transversais). Por fim, o modelo empírico foi comparado ao projeto, que é a imagem abaixo.
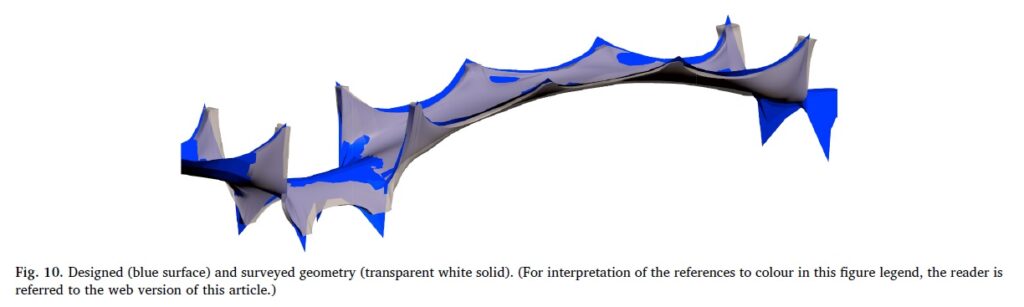
Surpreendentemente (ou não, para quem conhece a manufatura italiana), a diferença entre a ponte fabricada e a estrutura projetada são mínimas. O modelo gerado foi usado para diversas simulações , como distribuição de cargas e vai servir para o desenvolvimento de novas estruturas baseadas nesse método.
Modelo de Barragens
No mesmo sentido que o caso anterior, tem sido desenvolvido uma série de trabalhos na Itália a respeito da barragem de Ridracoli, que fica em Forlì-Cesena, na região da Emilia-Romagna. Esta aplicação, na verdade, é descrita em três artigos. O primeiro, assinado por Giulia Buffi et. al., em 2017 (https://doi.org/10.1080/19475705.2017.1362039) descreve em detalhes como foi elaborado o modelo da barragem com um drone. O segundo é um estudo da precisão desse modelo, de Elena Ridolfi et. al., também de 2017 (https://doi.org/10.3390/s17081777). Por fim, o terceiro trata da aplicação de BIM ao modelo, também assinado por Buffi em 2018 (http://dx.doi.org/10.6092/issn.2036-1602/8817).
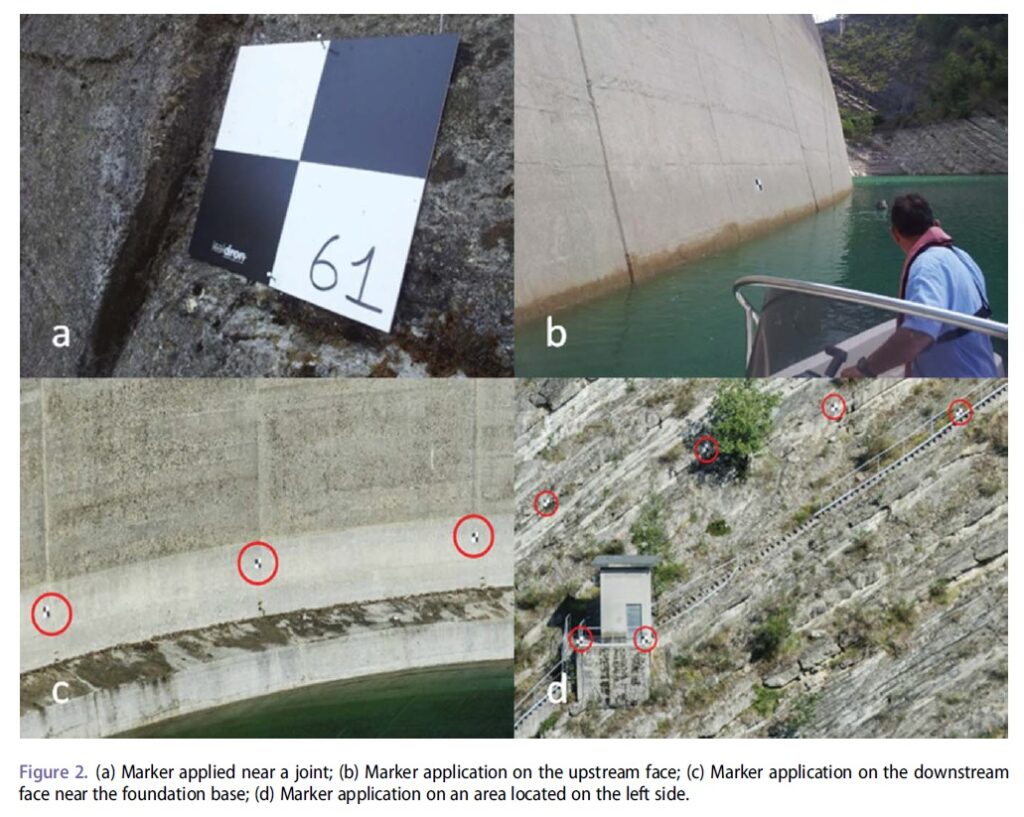
Assim como em outros trabalhos anteriores, para garantir a precisão do modelo, foram combinadas as técnicas de topografia convencionais (estação total), scanner 3D a laser (TLS) e fotogrametria com drone. O grupo espalhou 226 pontos de controle em toda a barragem, de modo a obter uma grande consistência dimensional em todo o modelo. As posições desses pontos foi aferida com estações totais a partir de pontos bem estabelecidos da barragem.
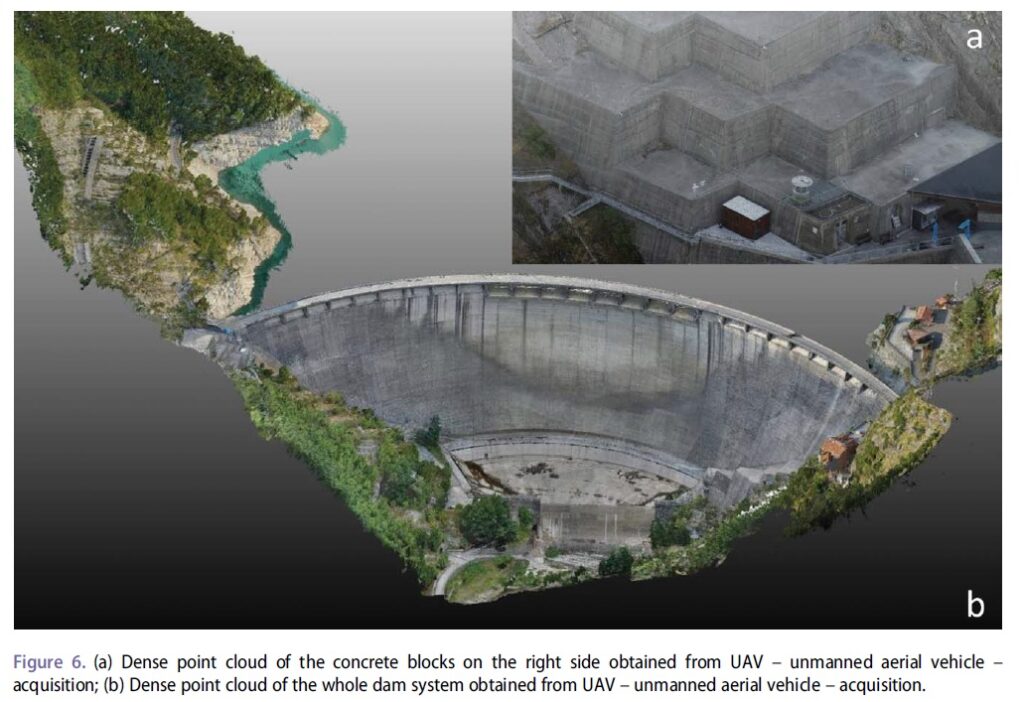
As imagens para fotogrametria foram coletados num total de 19 vôos de 15 minutos cada, colhendo 4600 imagens de 36 megapixels cada a uma distância entre 15 a 25 m da estrutura. Não foi especificado o modelo de drone usado. Para facilitar os cálculos, o modelo foi dividido em três e posteriormente unificado.
Assim, como nos trabalhos anteriores, o modelo elaborado por scanner a laser foi usado como base para validação do método fotogramétrico, e obteve resultados parecidos com outros reportados na literatura. Um dado interessante que esse estudo revela é que as trincas não aparecem na reconstrução 3D, mas é possível identificá-las através dos valores RGB, ou seja, imagens, do modelo.
O trabalho seguinte faz uma análise bastante detalhada dos pontos de controle e explica como foi escolhida, entre outras coisas, a sua distribuição para otimizar os dados do modelo. O terceiro artigo trata da adequação do modelo para aplicação de métodos de elementos finitos. Esta série de trabalhos acabou originando mais alguns de 2017 (https://doi.org/10.1016/j.proeng.2017.09.169), de 2020 e de 2021 (http://dx.doi.org/10.1007/978-3-030-51085-5_42), justamente aprofundando essas análises.
Uma coisa interessante que notei lendo esses artigos é que a Giulia Buffi assina os primeiros como parte da Università degli Studi di Perugia, e os últimos como Romagna Acque Società delle Fonti SpA,, que é a empresa dona da barragem. Essa empresa esteve envolvida nessa pesquisa desde os primeiros artigos, e é bem possível que a Buffi tenha sido contratada justamente por causa disso.
Aplicações no Brasil
Aqui no Brasil, a atividade nessa área ainda é incipiente, e a melhor referência que encontrei foi o e-book disponibilizado pela Universidade de Santa Maria, Rio Grande do Sul, intitulado “Drones e Ciência – Teoria e Aplicações Metodológicas”, organizado por Gonzalo Prudkin e Fabio M. Breunig. A publicação pode ser baixada diretamente do repositório da UFSM, clicando aqui. Este livro é, na verdade, um compêndio de diversos trabalhos realizados na área, e foi publicado em 2019.
Dentre os capítulos do livro, o que mais se enquadra no tema deste artigo é o trabalho de Taís Correia Leite, “Integração de levantamento fotogramétrico aéreo com o uso de VANT e levantamento fotogramétrico terrestre para o mapeamento tridimensional das ruínas de São Miguel das Missões”. Neste trabalho, no entanto, o drone utilizado era de asa fixa, e o seu papel foi o de fazer o levantamento topográfico e geolocalização do espaço. Já o trabalho de fotogrametria da ruína foi feita em solo com uma câmera DSLR a partir do solo, e foi gerado um modelo de baixa resolução, já que a ênfase do trabalho não era a modelagem estrutural da construção.
Também pesquisei bastante o mercado privado, e existem algumas empresas que trabalham com scanner 3D (TLS), mas não encontrei nenhum que aplique a fotogrametria com drones nos moldes dos trabalhos que apresentei acima. No entanto, isso quer dizer que o Brasil possui um imenso potencial para o crescimento de empresas baseadas nessa tecnologia.
Já na área de inspeções, a empresa H3Dynamics, de Singapura, disponibiliza no Brasil o software H3ZOOM.AI, que é a implementação comercial do modelo proposto por Ko et. al. Inclusive, na feira Drone Show deste ano, 2022, haverá um workshop sobre o assunto.
Resultados Experimentais
Baseado nesses trabalhos, conduzi os seguintes estudos, buscando alguns modelos que me permitissem recriar alguns resultados, dentro das minhas possibilidades. Para isso, usei um drone DJI Phantom 3 Professional e uma câmera DSLR Pentax K-70. Os locais escolhidos para testes representavam situações próximas daquelas dos estudos citados acima.
Metodologia e equipamentos
Em resumo, a técnica consiste em tirar um número suficiente de fotografias do objeto desejado por diversos ângulos, sempre com uma sobreposição de 60 a 80% entre as fotos. Com isso, o software possui pontos de referência suficientes – ou feições, para fazer as triangulações entre as fotos e achar as posições das câmeras. Além disso, todas as informações da câmera são relevantes – principalmente o tamanho do sensor e a distância focal, porque entram no cálculo.
Mais um fator importante é escolher horários nos quais as sombras sejam minimizadas e a luz seja mais macia. Normalmente, isso ocorre no começo ou no fim do dia e quando o tempo está encoberto. É preciso evitar horários com sombras muito fortes porque elas marcam o modelo e prejudicam a estimativa de profundidade. Já os parâmetros da câmera precisam ser otimizados para maximizar a profundidade de campo e a nitidez das imagens. No caso do drone, por ser uma óptica toda fixa, não tem muito o que fazer. Já na Pentax, é possível fechar a abertura ou aumentar o comprimento focal para capturar mais detalhes. Os modelos parecem convergir melhor quando são usadas fotos mais abertas, com comprimento focal menor, e tiradas entre 3 e 5 metros de distância.
Câmeras
Os parâmetros das câmeras fazem parte do núcleo do algoritmo de fotogrametria, especificamente as dimensões do sensor e o comprimento focal da lente. Deste modo, é importante dar as especificações dos equipamentos para efeito de documentação e repetibilidade.
O drone DJI possui uma câmera de 12 megapixels com abertura f/2.8 fixa, foco fixo no infinito e comprimento focal de 4 mm, que dá um campo de visão de 94 graus e comprimento de 20 mm no padrão full frame.
Já a Pentax K-70 possui um sensor APS-C de 24 megapixels e sem filtro anti-aliasing. Foram usadas duas lentes com a Pentax nesse artigo: Sigma 28-300mm f/3.5-6.3 e Pentax SMC DAL 18-55mm f/3.5-5.6 mm. Em alguns casos, as fotos foram tiradas sem melhoramento de contraste e nitidez, já em outros foram otimizadas para sair da câmera com a melhor qualidade possível.
Hardware e Software
O software utilizado para processar as fotos foi o Meshroom, que você pode encontrar em detalhes como é usado nesse outro artigo aqui. O computador é um Intel Core i5 11260H, com placa de vídeo Nvidia RTX 3050 Mobile com 4 Gb dedicado e a memória do sistema é de 12 Gb. Essa quantidade de memória tem sido suficiente, mas não mais que suficiente, e é comum o sistema operacional ter que usar o cache em disco em algumas partes do processamento. O ideal é ter 16 Gb, no mínimo. Os tempos de processamento variam de caso a caso de acordo com o número de fotos e a quantidade de feições de cada modelo, mas tipicamente leva algo entre 2 e 12 horas.
Depois, esse modelo é importado no Blender, onde são criadas as renderizações das vistas orto-retificadas.
Modelos
Para testar os limites da fotogrametria, escolhi lugares diversos que apresentavam desafios diferentes e que pudessem me dar uma boa idéia do que esperar em cada caso. Também levei em conta que todos são acessíveis desde o solo, assim poderia verificar pessoalmente qualquer dúvida relacionada ao modelo. A idéia é justamente saber o quão confiável é a técnica.
Coluna no viaduto da Av. Paula Souza em Campinas – SP
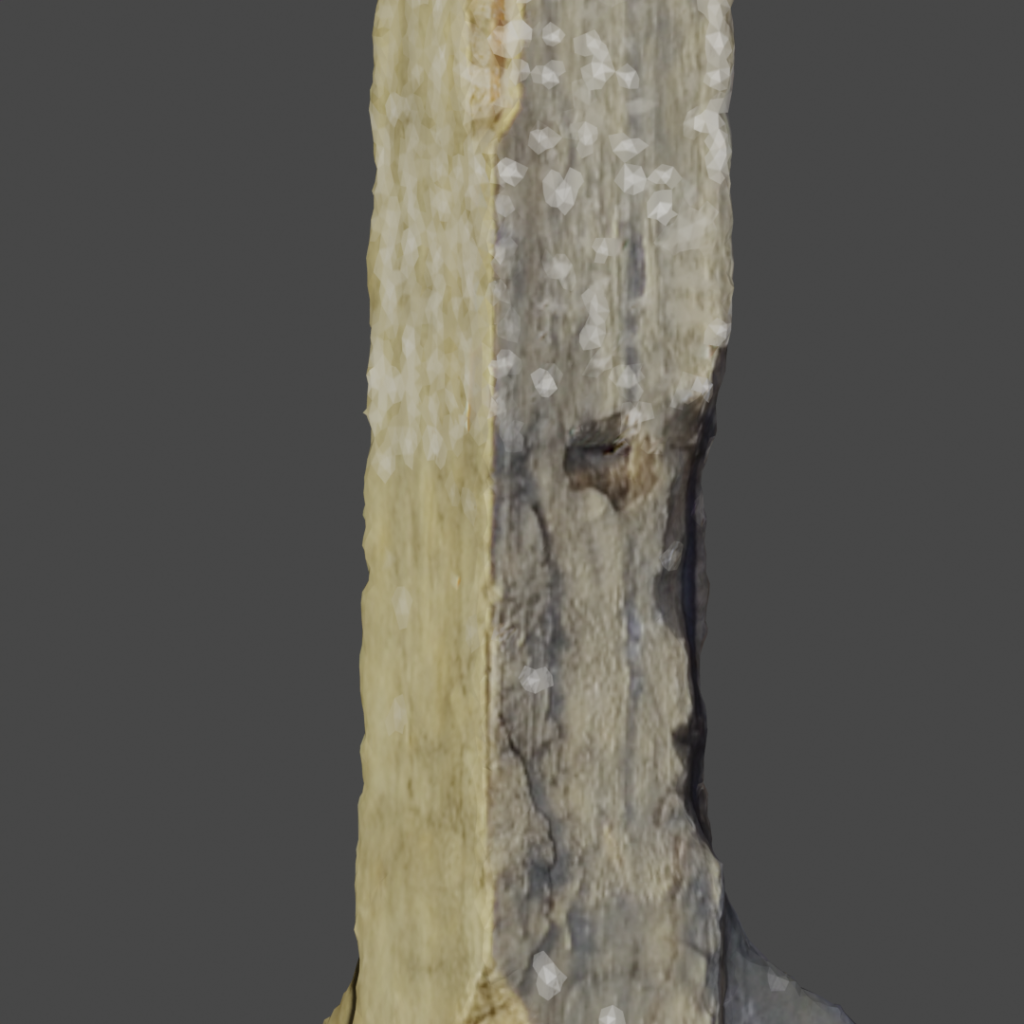
Existe um viaduto abandonado há várias décadas na Av. Paula Souza, em Campinas, e que servia a uma antiga linha de trem. As colunas desse viaduto possuem patologias bastante acentuadas e é fácil de fotografar, além de estar no nível do solo. Por isso, ele foi escolhido como primeiro teste do método. Foram tiradas 72 fotos com a Pentax K70 usando a lente Pentax SMC DAL 18-55 mm em 32 mm (equivalente a 48 mm em full frame) com f/8 a 1/40s e ISO 800 com perfil de cores neutras, que dá um resultado com boa saturação e definição. Esses parâmetros geraram JPEGs com boa nitidez em toda a profundidade da coluna, como no exemplo abaixo.

Neste tipo de objeto, que tem seção circular, a profundidade de campo é muito crítica porque, se ela for muito pequena, mesmo os pontos próximos do foco ficarão borrados. É preciso usar a lente mais fechada, por isso tive que recorrer ao ISO 800. A velocidade do obturador também é crítica quando não se dispõe de um tripé, e 1/40s é adequado para o comprimento focal de 32 mm com a estabilização do sensor ativada.
Já a distância de trabalho foi calculada de modo a manter toda a coluna no quadro, o que resultou em algo da ordem de 1 metro, que foi mantido aproximadamente constante em todas as fotos. A essa distância e com esse comprimento focal, o campo de visão horizontal era de 739 mm, resultando em 0,12 mm/pixel no sensor e a profundidade de campo era de 293 mm. Com esses parâmetros, foi possível obter um modelo com altíssimo nível de detalhamento. Também foram tiradas mais fotos na região de maior dano, tentando variar ao máximo a pose da câmera para capturar a maior quantidade possível de informação espacial. O modelo foi feito no Meshroom usando todas as configurações padrão. Abaixo, está o produto final já com a texturização.
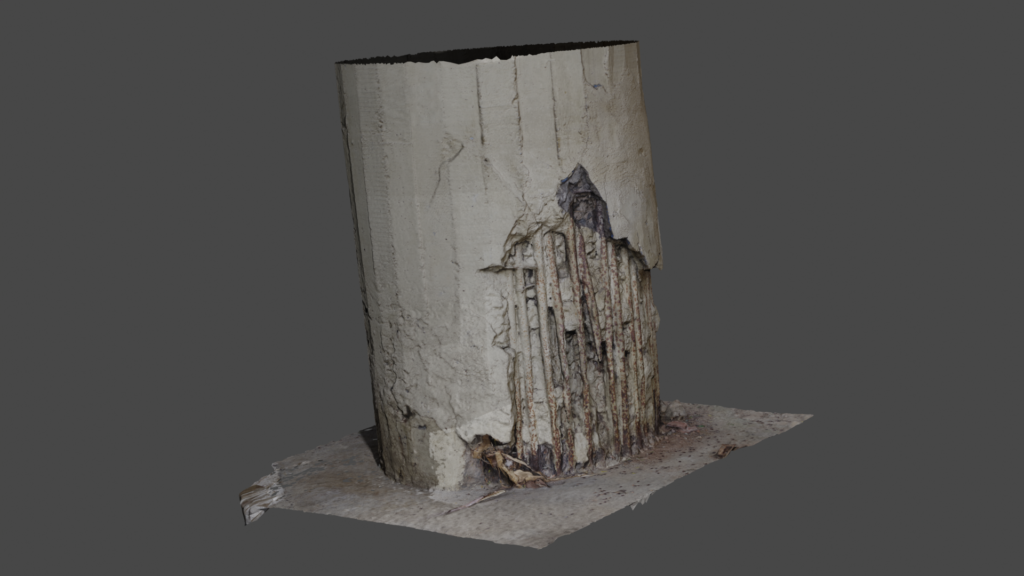
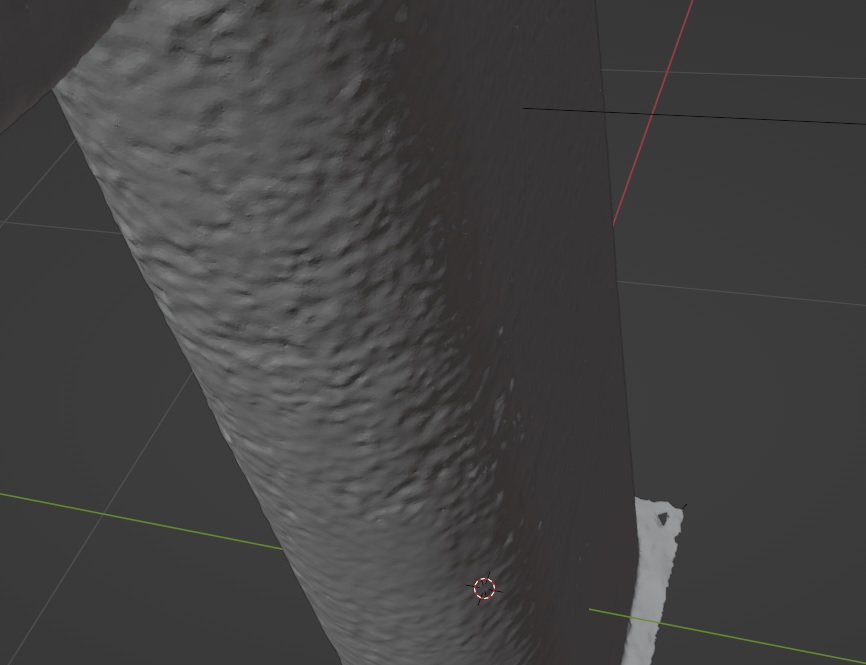
Abaixo, uma renderização (ou seja, uma imagem foto-realista feita digitalmente a partir do modelo) em close-up de uma das áreas que mais chamam a atenção, que é uma barra de ferro rompida. A preservação dos detalhes das fotos originais é impressionante.
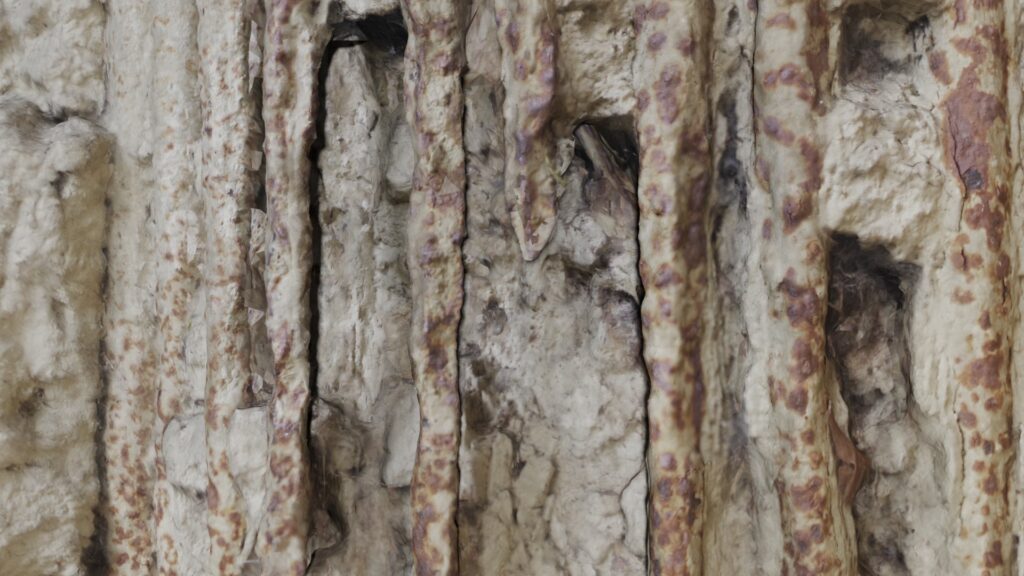
O vídeo abaixo foi feito no Blender com uma luz bem dura, para evidenciar as cavidades do modelo. A performance da fotogrametria em superfícies irregulares é realmente ótima, e é onde a precisão costuma ser máxima. Note como foi registrada a forma das barras corroídas, mesmo em ângulos que são impossíveis de obter com a câmera no mundo real.
Coluna do Viaduto Centenário em Americana – SP
No centro de Americana, também no interior de São Paulo, existe um viaduto muito importante que atravessa o Ribeirão Quilombo e que é uma das vias mais importantes da cidade. Ele apresenta algumas patologias leves na sua estrutura e, por isso, selecionei uma de suas colunas para o teste de fotogrametria em vôo com o drone.
A que escolhi fica numa área mais recolhida, num gramado entre a linha do trem e um bairro. Era mais fácil cumprir a legislação de drones nessa área porque ali não havia o risco de sobrevoar pessoas não anuentes, desde que o nível de vôo fosse mantido abaixo da altura da pista, o que não foi problema. Também não há nenhuma restrição ao vôo para esta região acusada pelo sistema SARPAS, que concedeu autorização prontamente.

Além disso, o fato de ter poucas patologias seria um bom teste para saber o quanto o modelo 3D é útil na identificação precoce dessas falhas. Como vimos no modelo anterior, a fotogrametria funciona muito bem em objetos que contêm bastantes detalhes, sendo excelente para a caracterização de falhas já consolidadas. Porém, também é de interesse saber se ela é tão boa em falhas mais sutis.
O vôo foi executado logo pela manhã, por volta das 7 horas, já que a iluminação é abundante, há menos pedestres na região e não existem sombras ou áreas muito iluminadas na coluna. O drone foi mantido a uma distância de 3 a 5 metros da coluna e as fotos foram processadas sem melhoramento de cor e nitidez. A exposição foi feita em modo automático, mas foram obtidos resultados bem consistentes em todos os quadros. O ISO foi de 100 e a exposição da ordem de 1/100, havendo pouca variação dependendo da posição do drone. A profundidade de campo, nesse caso, pode ser considerada infinita porque essa câmera é projetada para ter foco no infinito. Efetivamente, porém, testes de bancada que realizei anteriormente mostraram que as imagens já estão no limite de definição do sensor a partir de 1 m.
A 4 metros de distância – que representa uma boa média da distância de trabalho durante toda a coleta de fotos; cada pixel da imagem equivale a aproximadamente 1,5 mm. Portanto, a resolução das fotos deve ser suficiente para caracterizar feições bem pequenas. Outro detalhe importante é que, apesar de o gimbal do drone poder apontar até 30 graus para cima, não é possível fazer fotos olhando desde baixo porque as hélices aparecem no quadro, o que prejudicou algumas partes do modelo. Além disso, não foi possível voar mais próximo da coluna para aumentar a resolução porque esse drone não conta com sistema anti-colisão frontal. Também há perda do sinal do GPS quando ele está debaixo de estruturas de concreto, o que torna o vôo mais instável. A única solução possível, então, foi voar um pouco mais longe.
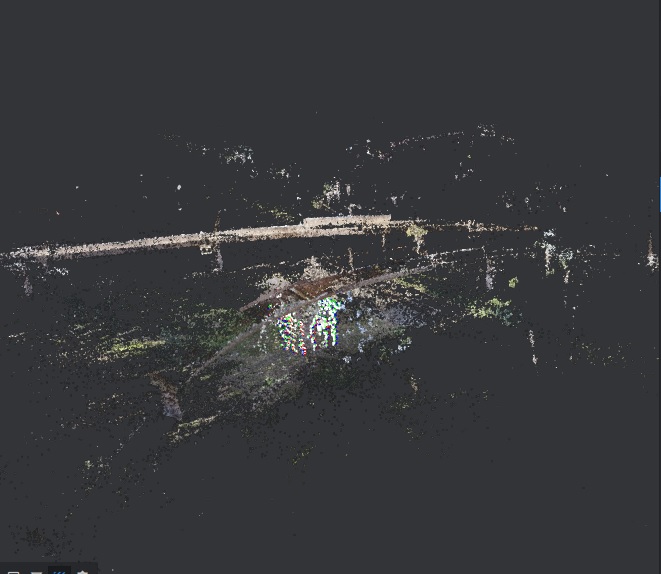
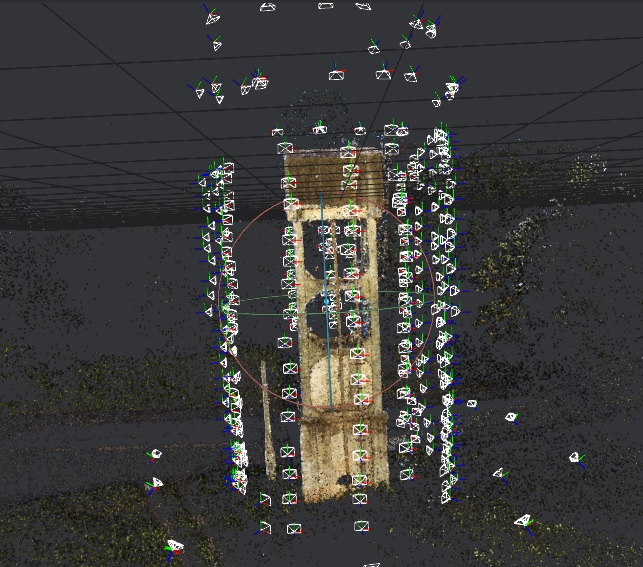
Ao todo, foram feitas 237 fotos com o drone. Todas foram processadas no Meshroom usando os parâmetros normais para extração das feições, ou seja, o algoritmo foi o SIFT, a quantidade foi ‘normal‘ e a qualidade também foi ‘normal‘. Como pode ser visto na figura abaixo, a nuvem de pontos acabou englobando uma área muito maior do que a coluna em si, o que geraria problemas mais adiante, já que os pontos do meshing teriam que ser distribuídos por toda a nuvem de pontos. Isso criaria uma modelo de baixa resolução. Também é importante notar que isso se deve à característica de foto fixo no infinito dessa câmera, que faz com que todos os objetos distantes sejam reconhecidos pelo algoritmo. Do lado positivo, esses pontos ajudam a recriar a cena com muito mais precisão. Na verdade, existem muitos relatos de pessoas que criaram cenários sem fundo para digitalizar objetos pequenos e que os modelos não deram certo.
A questão de obter um modelo detalhado só de uma área de interesse, no entanto, pode ser resolvido com a opção ‘Custom Bounding Box’ no módulo Meshing. O que esta função faz é limitar o volume que será usado para computar o mesh. Assim, podemos focar todos os recursos somente na parte que interessa que é a coluna. O mesh foi elaborado com ‘Max Input Points’ de 20.000.000 e ‘Max Points’ 2.000.000. Essas duas opções fazem com que o modelo caiba na quantidade de memória que eu tenho disponível, sem perda significativa de resolução. Na figura abaixo está o resultado do Meshing.
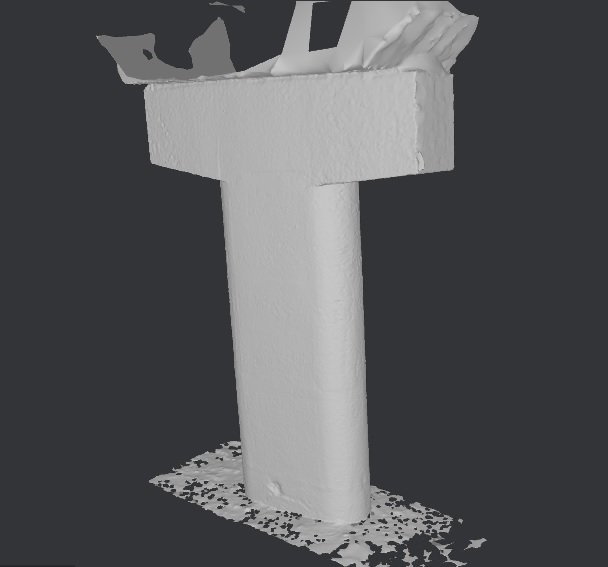
Os defeitos do modelo se concentram no chão – onde tinha mato, que é uma estrutura que normalmente o Meshroom não pega; e na pista que fica apoiada sobre a coluna. Isso é perfeitamente esperado porque essas partes não foram devidamente fotografadas, já que não estavam na área de interesse. Outras regiões de dificuldade são as duas faces externas da viga superior, porque existiam poucas feições para o Meshroom criar o modelo. Na verdade, é preciso de um pouco de defeitos e de texturas para que o modelo se forme adequadamente. Abaixo está o modelo final.

O resultado, sem sombra de dúvidas, é muito bom, apenas com alguns defeitos pequenos. O passo seguinte é importá-lo no Blender, limpar algumas superfícies mal formadas e pontos espúrios, para depois criar as vistas orto-retificadas. Abaixo, temos as quatro vistas principais orto-retificadas do modelo renderizado.

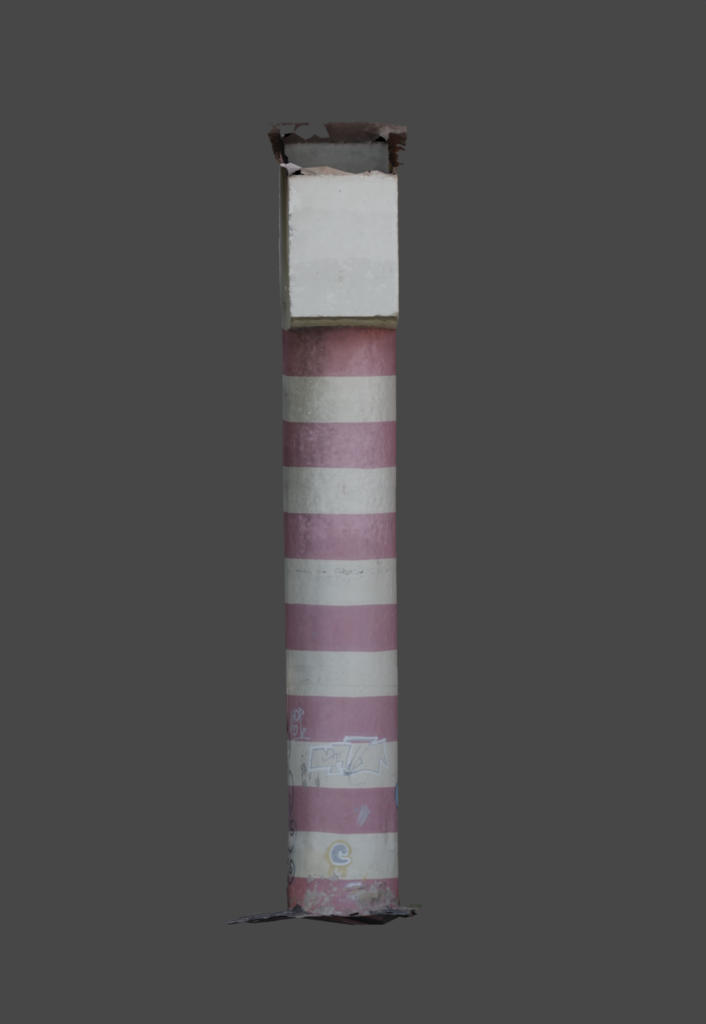


Esta é uma imagem mais detalhada, onde se pode ver claramente as marcas das formas usadas na fabricação. Este tipo de vista pode ser obtida de qualquer parte do modelo, inclusive com ângulos diferentes, não necessariamente sendo uma imagem frontal orto-retificada.

Abaixo, uma imagem de uma das partes que apresentam patologias leves. É possível identificá-las sem maiores dúvidas. No caso do uso da técnica para inspeção, esta seria uma triagem preliminar que selecionaria locais para serem inspecionados por uma equipe especializada.

Problemas
Os problemas encontrados no modelo são os esperados para a fotogrametria. Abaixo está a parte que não foi possível fotografar de baixo para cima, e realmente não resultou numa superfície condizente com a realidade. Uma das causas, além da perspectiva ruim das fotos, deve ser a falta de feições já que não existem muitos defeitos nesta região dos pilares.
O segundo problema é ruído excessivo na superfície do objeto, que acabou sendo muito mais pronunciada no modelo do que no objeto real. A razão disso é que a fotogrametria é menos precisa na direção do eixo óptico da câmera. É fácil entender isso. Imagine algo que se move no quadro para cima ou para baixo. Basta ele se deslocar um pixel para que seja detectada a nova posição. Porém, se o objeto se move para dentro ou para fora do quadro, é preciso um grande movimento para que a sua mudança de posição se torne aparente na imagem.
Esse tipo de efeito pode ser combatido fazendo fotos com a câmera inclinada, e não olhando frontalmente como foi feito. Com isso, diminui-se essa imprecisão na medida entrando ou saindo da foto. Entretanto, como efeito colateral, a relação pixels por unidade de comprimento acaba sendo diferente dentro da mesma imagem, o que pode levar a problemas de resolução. Cabe testar essa possibilidade na prática.
Caixa d’água em Carioba em Americana – SP
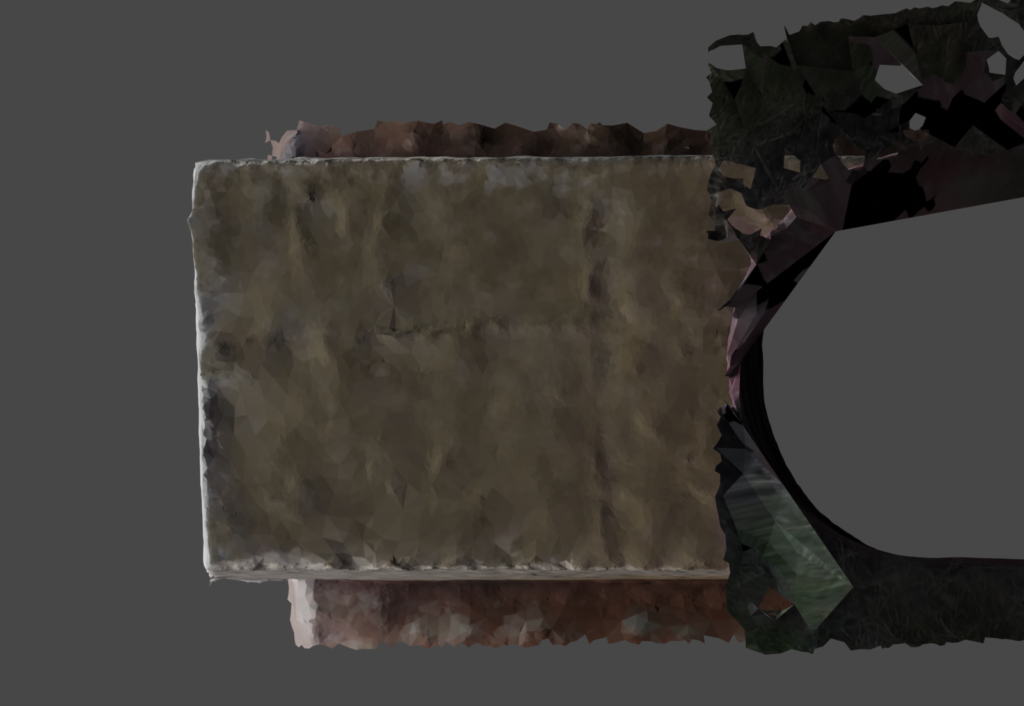
Neste terceiro teste, quis verificar a capacidade de fazer um modelo mais complexo, com patologias leves e graves, superfícies mais complexas e que pudesse ser usado em outras aplicações, como simulação de elementos finitos. Para isso, escolhi uma caixa d’água antiga no distrito de Carioba, em Americana. Ela é ideal para esse estudo porque está numa área bem livre, onde passam poucas pessoas não anuentes e não há nenhuma restrição de vôo no sistema SARPAS.
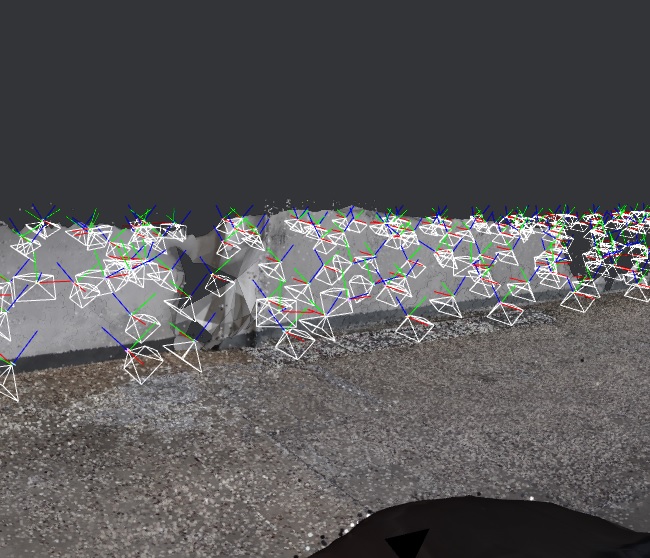
Os vôos foram feitos nas mesmas condições do Viaduto Centenário, com a distância de vôo mantida entre 3 e 4 metros. Ao todo, foram feitas 326 fotos com o drone e 20 com a câmera, para complementar as partes que só podem ser vistas de baixo para cima. A exposição das fotos com o drone foi controlada por ponto de interesse em metade das fotos e manualmente na outra metade. O método manual se mostrou mais consistente, sendo necessário fazer ajustes apenas quando se mudava de uma face para outra da torre. Entretanto, os resultados foram bem consistentes de maneira geral. Na imagem abaixo, podemos ver a nuvem de pontos e as posições da câmera.
Na próxima figura, está o modelo final da caixa d’água. Nele, elementos desnecessários que aparecem nas fotos – como aquele poste à esquerda na imagem acima; foram removidos. O resultado também possui muito poucos defeitos.

Já a imagem abaixo é a vista ortográfica da torre sem o poste na frente, o que seria impossível de obter sem a fotogrametria.

Nesse mesmo sentido, elementos indesejados podem ser removidos do modelo para permitir a visualização da estrutura em si, sem obstáculos. O modelo também permite análises quantitativas. Veja, por exemplo, a área danificada abaixo.
E este é o corte transversal do modelo, que mostra como os cantos já estão deteriorados. Com essa imagem, é possível fazer uma boa estimativa da área da seção transversal que já foi comprometida pela patologia. Além disso, nota-se facilmente que há uma protuberância no canto inferior esquerdo que, junto à verificação da presença de uma trinca na foto acima, indica que esta região já está comprometida pelo estufamento da ferragem, e que o desplacamento deve ocorrer em breve.
Além dessas aplicações, esse modelo poderia servir, ainda, para simulações com elementos finitos. Suponha uma construção que se queira saber qual é o comportamento com o vento. Pode-se criar o modelo fotogramétrico e usá-lo como base para uma simulação com ANSYS, openFOAM, etc.
Planta fotográfica de estacionamento
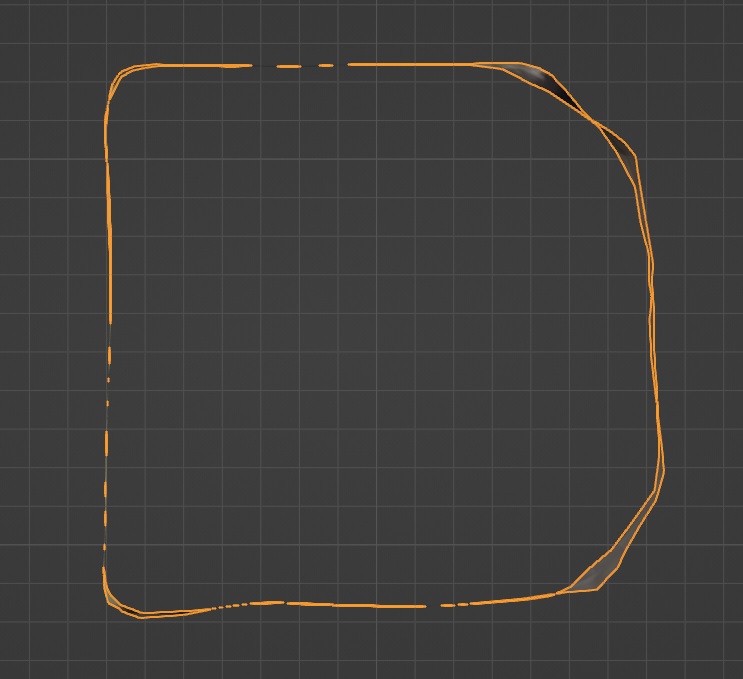
E se a fotogrametria fosse usada para criar fotos aéreas sem precisar de um drone? Isso resolveria alguns problemas, como por exemplo em áreas em que o vôo não é permitido ou sob locais cobertos. A resposta é que não só é possível, como também gera resultados excelentes. Para isso, fotografei a garagem de um prédio com a Pentax K-70 a uma inclinação de aproximadamente 60 a 70 graus em relação ao solo. Em seguida, as fotos foram refeitas em sentido oposto, assim tenho cada parte fotografada a partir de dois ângulos diferentes. Na imagem abaixo, podemos ver a área que foi fotografada dentro das linhas vermelhas. Mais da metade da área fica coberta pelo prédio.

A lente usada foi a Pentax SMC DAL 18-55mm a 18 mm (equivalente a 27 mm em full frame), f/4, ISO 100 e exposição 1/40s. A câmera foi posicionada com as mãos na altura dos olhos, o que fez com que as imagens fosse tiradas a cerca de 2,4 m do ponto central. Apesar de as fotos terem sido feitas com inclinação e com a lente aberta, a profundidade de campo foi suficiente para gerar um bom modelo. Ao todo, foram feitas 569 fotos do ambiente todo. A imagem abaixo mostra uma parte do modelo, onde é possível ter uma boa idéia das posições da câmera.
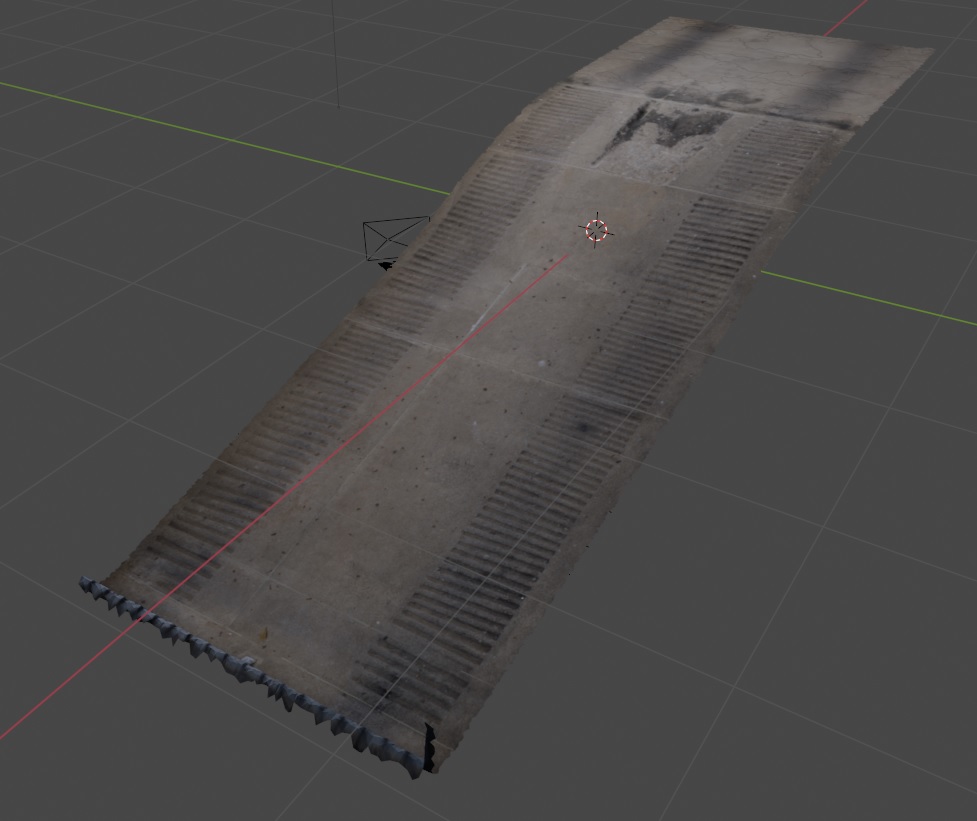
Já a figura abaixo é a renderização orto-retificada do modelo feita com o Blender. O nível de detalhes do modelo é impressionante, apesar dele estar renderizado em baixa resolução na imagem. Porém, é possível obter imagens de centenas de megapixels, sendo a memória RAM o fator limitante.

Abaixo é um zoom na versão de 96 megapixels da foto acima. É possível ver até as pequenas trincas do pavimento. Também pode-se renderizar pequenas porções do modelo por vez, criando imagens de altíssima resolução.

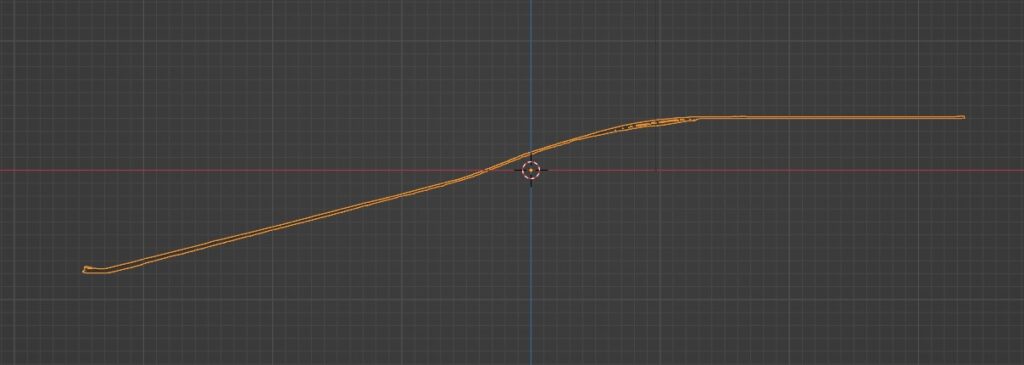
Além do detalhamento fotográfico, o modelo também fornece informações importantes sobre a geometria do pavimento. Na imagem abaixo, temos a rampa de entrada da garagem.
De onde podemos tirar o perfil de inclinação da rampa, mostrado na imagem a seguir. Com este perfil, é possível determinar quantitativamente deformações, elevações, torções, ângulos, etc. O modelo fotogramétrico pode ser usado para se fazer um levantamento dimensional completo da área.
Limitações e Possibilidades
A intenção inicial deste trabalho era avaliar a possibilidade de utilizar drones para criar modelos fotogramétricos de locais de difícil acesso para inspeção técnica em busca de patologias, especialmente em concreto reforçado com aço. Algumas metodologias já existem nesse sentido, como já explorei neste outro artigo, em que mostro os trabalhos de um grupo italiano e um árabe. No entanto, ambos os grupos usaram equipamentos fotográficos melhores que o meu drone, o que possibilitou que eles obtivessem mais detalhes das estruturas mesmo voando mais longe. Neste sentido, a maior limitação do meu trabalho tem sido a baixa resolução da câmera (apenas 12 megapixels) e o comprimento focal muito curto (equivalente a 20mm em full frame). Esses dois fatores diminuem muito a resolução das texturas dos modelos, o que dificulta a identificação de falhas pelas imagens e gera imperfeições nos modelos.
No caso das patologias severas, como foi a coluna na Av. Paula Souza e na torre em Carioba, a técnica se mostrou bastante confiável em identificar os desplacamentos, sendo capaz de gerar imagens que permitem estimativas quantitativas no segundo caso. Porém, quando a patologia é muito severa, a identificação pode ser feita à distância com o uso de lentes de comprimentos focais muito longos (como as câmeras de superzoom) ou com fotografia convencional com drone, sem a necessidade de processamento. Mesmo assim, a fotogrametria pode fornecer informações espaciais que estas outras técnicas não conseguem.
A idéia fundamental por trás do uso de drones em inspeções na engenharia civil é realizar uma primeira avaliação para depois enviar uma equipe especializada aos locais que precisam de maior atenção. Neste caso, o ideal é que seja possível identificar as patologias menos severas e ainda incipientes, o que se mostrou um pouco problemático com a tecnologia que foi empregada. Talvez isso possa ser melhorado, conforme indica a literatura acadêmica da área, com o uso de câmeras melhores.
Uma outra limitação diz respeito à uma característica própria da fotogrametria. Deslocamentos que ocorrem no plano do sensor podem ser facilmente detectados, mas os que ocorrem no eixo principal da câmera, ou seja, a profundidade, são muito mais difíceis de detectar. Por isso, o maior ruído do modelo está justamente nas superfícies que foram fotografadas de frente pela câmera. Isso aumenta a dificuldade em encontrar defeitos pequenos pela análise do modelo 3D. Essa limitação já havia sido reportada na literatura por Buffi et. al. num estudo sobre barragens (https://doi.org/10.1080/19475705.2017.1362039). A fotogrametria pode oferecer a identificação de trincas pelas texturas (texturas são as imagens que são projetadas sobre o modelo 3D), mas não pela informação espacial do modelo.
Por outro lado, ficou bem claro, tanto no modelo da caixa d’água quanto do Viaduto Centenário, que o modelo foi capaz de capturar muito bem as formas principais das estruturas. Portanto, conforme também já é bem demonstrado na literatura (ver Marmo et. al. https://doi.org/10.1016/j.engstruct.2019.04.069, por exemplo) a fotogrametria é perfeitamente adequada para o levantamento de dados para a elaboração de modelos em CAD de estruturas antigas. Seria possível reconstruir toda a estrutura do Viaduto Centenário, por exemplo, criando modelos para cada uma das partes e juntando tudo no final. Depois, com técnicas de BIM, ele poderia ser transformado num modelo adequado para simulações por elementos finitos. Isto também já é bem documentado na literatura (ver, por exemplo, Achille et. al. https://doi.org/10.3390/s150715520).
Outra aplicação que aparece no trabalho de Achille é a criação de ortofotografias que podem ser usadas para a elaboração de desenhos de fachada. Assim, um prédio antigo que não possua mais os desenhos originais pode ser fotografado com um drone, reconstruído em 3D e então produzidas vistas orto-retificadas de todas as faces. Com estas vistas, um desenhista pode recriar ou atualizar as plantas. O mesmo pode ser feito com pavimentos e espaços confinados, conforme demonstrei acima. As plantas fotográficas também podem ter outras aplicações práticas na engenharia, como para elaboração de orçamentos mais precisos. Com elas, é possível medir áreas em detalhes, avaliar recortes e outras dificuldades.
Dados os resultados e as limitações que encontrei até agora, acredito que a área que tenha maior interesse nessas técnicas seja a de documentação de edifícios antigos que precisam de reparos ou de regularização. Esses modelos permitem que as equipes de engenharia possam obter informações precisas que outros métodos populares, como o bom velho papel, lápis e trena, não conseguem. Além disso, os modelos fotogramétricos oferecem possibilidades de documentação para laudos técnicos e vistorias que a fotografia convencional não permite.
Conclusão
Este foi o meu primeiro estudo de fotografia empregando um drone com o objetivo de criar técnicas para obtenção de dados para engenharia civil. Foi possível obter bons modelos com equipamentos disponíveis para o público geral, sem ser necessário nada de muito sofisticado. Os modelos demonstraram que podem ser usados, inclusive, para análises quantitativas. Por outro lado, ainda existem limitações que devem ser resolvidas dentro de algum tempo com o aprimoramento dos algoritmos de fotogrametria e com o avanço nas câmeras embarcadas nos drones. No entanto, conforme listei no capítulo anterior, já existem muitas aplicações práticas que o método permite na sua forma atual.